
海洋可持续发展

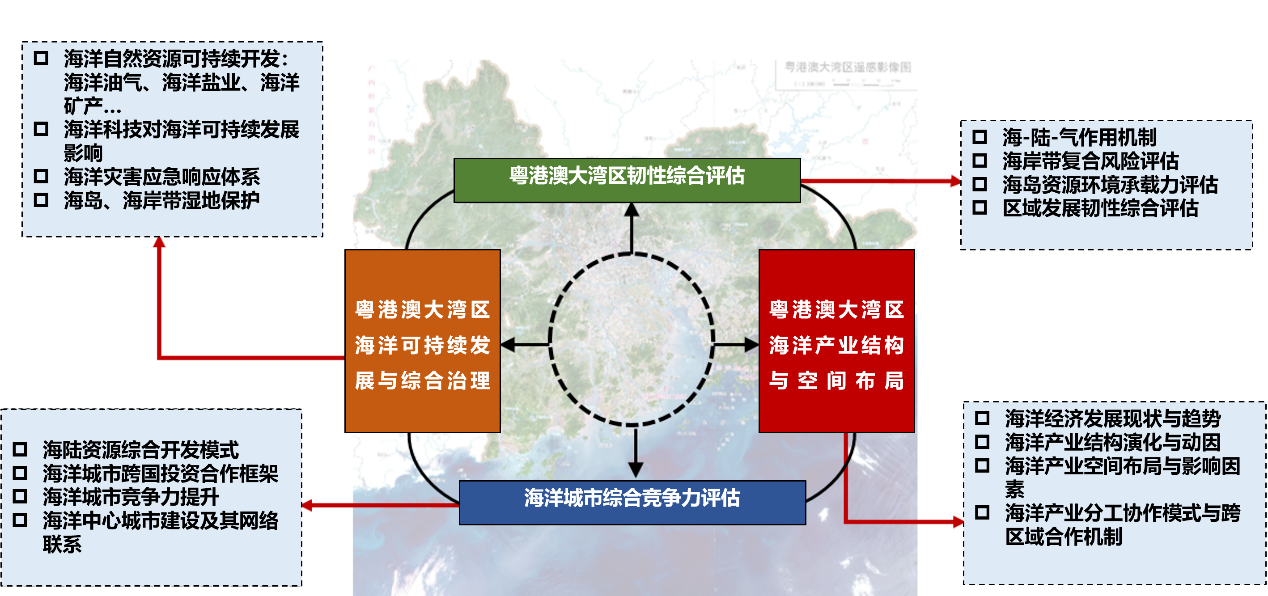
海洋人文地理团队研究框架
首席科学家
-
-
-
薛德升教授中山大学
-
-
-

-
葛咏研究员中科院地理科学和资源研究所
-

团队组建情况
-
- 43
- 总人数
-
- 2
- 首席科学家
-
- 11
- 核心成员
-
- 30
- 骨干成员
团队简介
-
- 韦春竹
- weichzh@mail.sysu.edu.cn
研究目标
研究进展
人才队伍
-
- 薛德升
- eesxds@mail.sysu.edu.cn
-
- 葛咏
- gey@lreis.ac.cn
-
- 蔡晓梅
- 452761119@qq.com
-
- 邓孺孺
- eesdrr@mail.sysu.edu.cn
-
- 刘小平
- liuxp3@mail.sysu.edu.cn
-
- 李军
- jutinli83@scnu.edu.cn
-
- 刘玉亭
- ytliu@scut.edu.cn
-
- 林耿
- lingeng00@163.com
-
- 李志刚
- zhigangli@whu.edu.cn
-
- Mark Jayne
- jayne@mail.sysu.edu.cn
-
- 朱竑
- zhuhong@gzhu.edu.cn

- 微信公众号

- OLAR官方公众号
地址:珠海市香洲区唐家湾镇中山大学海滨红楼海琴四号
分享到